
基于NanoPi的人体感应模块驱动开发
人体感应模块
热释电红外传感器是一种能检测人或动物发射的红外线而输出电信号的传感器。
电气参数
- 工作电压范围:DC 4.5-20V
- 电平输出高: 3.3 V /低0V
- 触发方式:L 不可重复触发/H 重复触发
- 延时时间:5S(默认)可制作范围零点几秒-几十分钟
- 封锁时间:2.5S(默认)可制作范围零点几秒-几十秒
- 电路板外形尺寸: 32mm*24mm
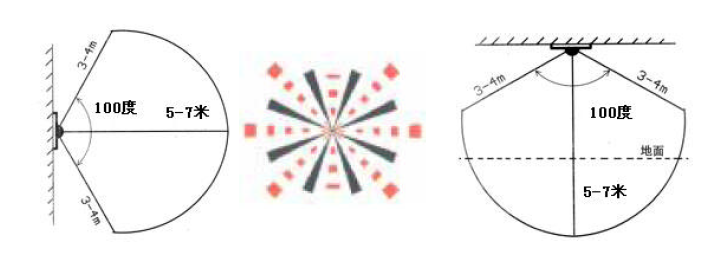
- 感应角度:<100 度锥角
- 感应距离:7 米以内
- 工作温度:-15-+70 度
- 感应透镜尺寸: 直径23mm(默认)
功能特点
- 全自动感应:人进入其感应范围则输出高电平, 人离开感应范围则自动延时关闭高电平,输出低电平。
- 光敏控制(可选择,出厂时未设):可设置光敏控制,白天或光线强时不感应。
- 温度补偿(可选择,出厂时未设):在夏天当环境温度升高至30~32℃,探测距离稍变短,温度补偿可作一定的性能补偿。
- 两种触发方式:(可跳线选择)
a.不可重复触发方式 : 即感应输出高电平后,延时时间段一结束,输出将自动从高电平变为低电平;
b.可重复触发方式:即感应输出高电平后,在延时时间段内,如果有人体在其感应范围活动,其输出将一直保持高电平,直到人离开后才延时将高电平变为低电平(感应模块检测到人体的每一次活动后会自动顺延一个延时时间段,并且以最后一次活动的时间为延时时间的起始点)。 - 具有感应封锁时间(默认设置:无封锁时间):感应模块在每一次感应输出后(高电平变成低电平),可以紧跟着设置一个封锁时间段,在此时间段内感应器不接受任何感应信号。
此功能可以实现“感应输出时间”和“封锁时间”两者的间隔工作,可应用于间隔探测产品;同时此功能可有效抑制负载切换过程中产生的各种干扰。(此时间可设置在零点几秒—几十秒钟)。 - 工作电压范围宽:默认工作电压DC4.5V-20V。
- 微功耗:静态电流<50 微安,特别适合干电池供电的自动控制品。
- 输出高电平信号:可方便与各类电路实现对接。
使用说明
- 感应模块通电后有一分钟左右的初始化时间,在此期间模块会间隔地输出0-3 次,一分钟后进入待机状态。
- 应尽量避免灯光等干扰源近距离直射模块表面的透镜,以免引进干扰信号产生误动作;使用环境尽量避免流动的风,风也会对感应器造成干扰。
- 感应模块采用双元探头,探头的窗口为长方形,双元(A 元B 元)位于较长方向的两端,当人体从左到右或从右到左走过时,红外光谱到达双元的时间、距离有差值,差值越大,感应越灵敏,当人体从正面走向探头或从上到下或从下到上方向走过时,双元检测不到红外光谱距离的变化,无差值,因此感应不灵敏或不工作;所以安装感应器时应使探头双元的方向与人体活动最多的方向尽量相平行,保证人体经过时先后被探头双元所感应。为了增加感应角度范围,本模块采用圆形透镜,也使得探头四面都感应,但左右两侧仍然比上下两个方向感应范围大、灵敏度强,安装时仍须尽量按以上要求。
感应范围
模块连接图

模块驱动程序
#include <linux/miscdevice.h>
#include <linux/delay.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/types.h>
#include <linux/delay.h>
#include <linux/moduleparam.h>
#include <linux/slab.h>
#include <linux/errno.h>
#include <linux/ioctl.h>
#include <linux/cdev.h>
#include <linux/string.h>
#include <linux/uaccess.h>
#include <linux/list.h>
#include <linux/clk.h>
#include <linux/io.h>
#include <linux/gpio.h>
#include <plat/gpio-cfg.h>
#include <mach/gpio-samsung.h>
#define DEVICE_NAME "2451_pir"
//nanopi2451
#define LGPIO S3C2410_GPG(11) //模块GPIO脚
static int pir_read(struct file *file, char * buffer, size_t count, loff_t * ppos)
{
unsigned tmp;
unsigned long err;
tmp = gpio_get_value(LGPIO);
printk("==%d==\n",tmp);
err = copy_to_user(buffer, &tmp, 1);
return 1;
}
static struct file_operations dev_fops={
read:pir_read,
};
static struct miscdevice misc = {
.minor = MISC_DYNAMIC_MINOR,
.name = DEVICE_NAME,
.fops = &dev_fops,
};
static int __init my_pir_init(void)
{
int ret;
s3c_gpio_cfgpin(LGPIO, S3C_GPIO_SFN(0));//设置输入
ret = misc_register(&misc);
printk (DEVICE_NAME"\t initialized\n");
return ret;
}
static void __exit my_pir_exit(void)
{
misc_deregister(&misc);
}
module_init(my_pir_init);
module_exit(my_pir_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("TONY www.91arm.com");
模块应用测试程序
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <errno.h>
#define DEV_FILE "/dev/2451_pir"
int main()
{
int fd_dev=-1;
char dat[8];
printf("nanoPi driver Test\n");
fd_dev = open(DEV_FILE,O_RDWR);
if(fd_dev<0){
printf("open device err\n");
return 0;
}
while(1){
dat[0]=0x55;
read(fd_dev,dat,1);
printf("dat=%x\n",dat[0]);
sleep(1);
}
return 0;
}
Copyright © 2016 www.91arm.com 【91创客学堂】